

Tous les produits
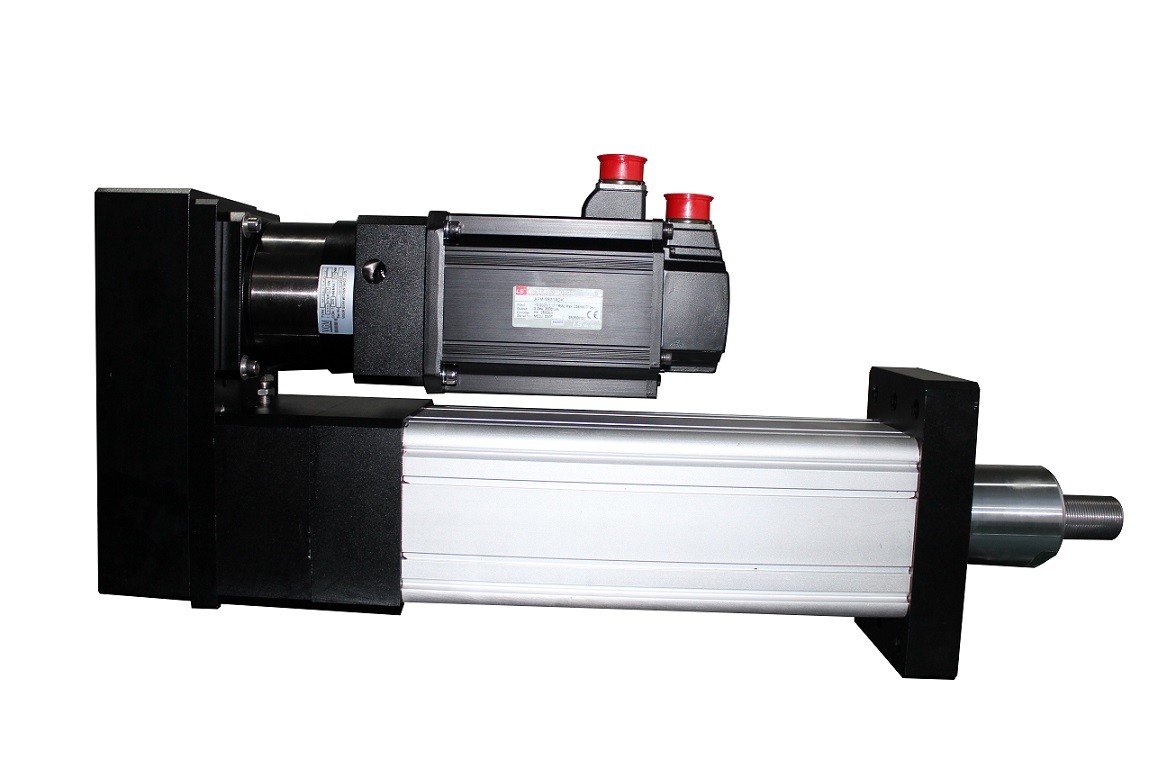
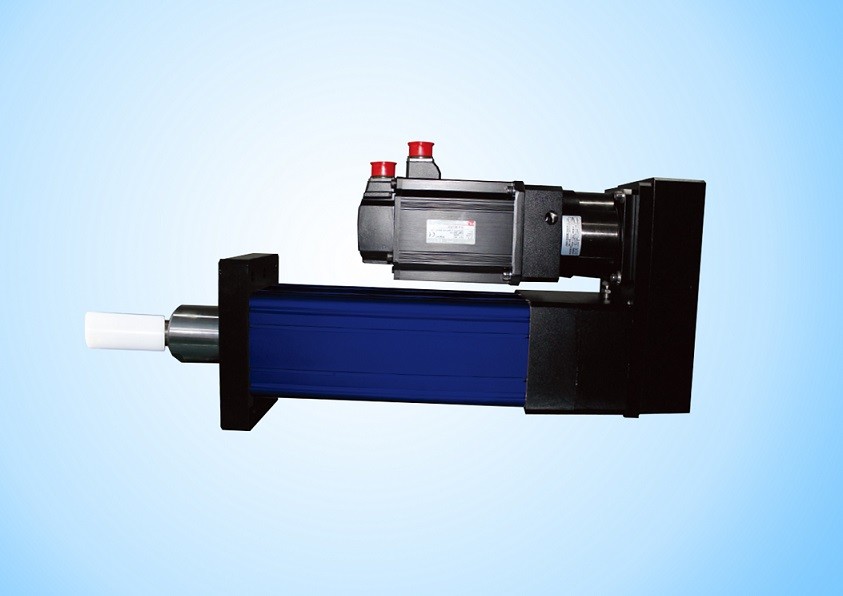
Cylindre électrique servo d'entraînement de vis de boule avec différents moteurs 50~1500mm



| Lieu d'origine | La Chine |
|---|---|
| Nom de marque | TJ |
| Certification | ISO9001:2008,CE |
| Numéro de modèle | TJER160 |
| Quantité de commande min | 1 pcs |
| Prix | negotiable |
| Détails d'emballage | emballage externe : carton ou boîte non en bois ; emballage de coussin : Mousse d'EPE |
| Délai de livraison | 3-4 semaines |
| Conditions de paiement | T/T, paiement de 30% à l'avance, 70% avant la livraison |
| Capacité d'approvisionnement | 800 PC par mois |
Détails sur le produit
| Matériel | En aluminium | Couleur | norme : le blue&silvery de marine, d'autres peut être adapté aux besoins du client |
|---|---|---|---|
| Vitesse | jusqu'à 300mm/s | Répétabilité | ±0.01mm |
| Course | 50~1500mm | Force de sortie | jusqu'à 100KN |
| type de connexion de moteur | linéaire/parallèle | anti-rotation interne | Avec/sans |
| AVANCE DE VIS | 10,20mm | type de connexion de charge | masculin, femelle, boulon en U, charnière principale de boule et adapté aux besoins du client |
| Mettre en évidence | déclencheurs électriques de cylindre de connexion linéaire,déclencheur servo linéaire de 1500mm,Cylindre électrique servo d'entraînement de vis de boule |
||
Description de produit
Déclencheur linéaire d'entraînement de vis de boule/vis de rouleau, match électrique servo de cylindre de 50~1500mm avec différents moteurs
1. Définition modèle de produit
images ..............................................
Exemple : 5H DU MATIN DE TJE075 S100 B R 2 P11 O/C N/P
|
TJE075-Series non.
TJE040 : 44×44mm TJE065 : 64×64mm TJE075 : 75×75mm TJE095 : 93×93mm TJE110 : 111×111mm TJE135 : 134×134mm |
Course de S100-Effective
TJE040 : 50-200mm TJE065 : 50-250mm TJE075 : 50-600mm TJE095 : 50-800mm TJE110 : 50-1000mm TJE135 : 50-1200mm |
|
Type de B-vis
A : Vis de point culminant B : Vis de boule C : Vis de rouleau |
R-Anti-rotation
R : Avec T : Sans (TJE040 toujours sans cette fonction) |
|
avance 05-Screw
TJE040 : 4mm TJE065 : 4, 5, 10, 16,20mm TJE075 : 4, 5, 10, 20, 40mm TJE095 : 4, 5, 6, 8, 10, 25mm TJE110 : 5, 6, 8, 10, 20, 32mm TJE135 : 10, 20, 50mm |
Type de support d'Un-moteur
B : Parallèle |
|
Type de support de M-cylindre
M1 : Double bâti latéral M2 : Bâti latéral de turnnion M3 : Bâti avant de bride M4 : Bâti arrière de bride M5 : Bâti arrière de chape M6 : Bâti d'arbre arrière MX : Adapté aux besoins du client |
C — type de connexion de charge
C1 : Mâle C2 : Femelle C3 : Boulon en U C4 : Charnière principale de boule LA CX : Adapté aux besoins du client |
|
2-Number des commutateurs de limite
(Le défaut est commutateur normalement ouvert de NPN) |
Commutateurs d'O/C-Limit
O : Normalement ouvert C : Normalement fin |
|
Type de N/P-Sensing
N : NPN P : PNP |
| Règle + capteur discordants de force |
|
Capteur de force : ① 4-20mA ② 0-10V Règle discordante : ① TTL 24V ② RS422 (différence 5V) |
|
Si manquer de la pièce, elle signifie sans dirigeant discordant ou capteur de force. P01 : Seulement avec la règle discordante TTL (24V) P10 : Seulement avec la règle discordante 4-20mA |
Marque :
1) Afin d'assurer la course efficace, deux extrémités doivent être l'espace réservé de 5mm.
2) Le capteur ne pourrait pas être monté du même côté du moteur quand le moteur est parallèle monté.
2. Couple servo électrique d'entraînement de cylindre
Et Tableau de sélection de puissance
| Connexion de moteur | Parallèle (commande par courroie) | |||||||||||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||||||||||
| Avance de vis | [millimètre] | 10 | ||||||||||||||||||||||
| Puissance de moteur | [Kilowatt] | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | |||||||||||
| Couple évalué de moteur | [N.M] | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | |||||||||||
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||||||||
| Force évaluée de cylindre | [KN] | 5,29 | 9,25 | 14,54 | 15,88 | 27,75 | 43,62 | 26,46 | 46,26 | 72,7 | 52,92 | 92,51 | 100 | |||||||||||
| Cylindre Max. Force | [KN] | 100 | ||||||||||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-300 | 0-300 | 0-165 | 0-110 | 0-100 | 0-65 | 0-100 | 0-30 | |||||||||||||||
| Connexion de moteur | Linéaire (commande directe de accouplement) | ||||||||||||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | ||||||||||||||||||||
| Avance de vis | [millimètre] | 10 | |||||||||||||||||||||||
| Puissance de moteur | [Kilowatt] | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | |||||||||
| Couple évalué de moteur | [N.M] | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | |||||||||
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||||||
| Force évaluée de cylindre | [KN] | 5,29 | 9,25 | 14,54 | 7,94 | 13,88 | 21,81 | 15,88 | 27,75 | 43,62 | 26,46 | 46,26 | 72,7 | 52,92 | 92,51 | 100 | |||||||||
| Cylindre Max. Force | [KN] | 100 | |||||||||||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-300 | 0-300 | 0-300 | 0-220 | 0-165 | 0-110 | 0-100 | 0-65 | 0-100 | 0-30 | ||||||||||||||
| Connexion de moteur | Parallèle (commande par courroie) | |||||||||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||||||||
| Avance de vis | [millimètre] | 20 | ||||||||||||||||||||
| Puissance de moteur | [Kilowatt] | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | |||||||||
| Couple évalué de moteur | [N.M] | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | |||||||||
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||||||
| Force évaluée de cylindre | [KN] | 2,65 | 4,65 | 7,27 | 7,94 | 13,94 | 21,82 | 13,23 | 23,23 | 36,36 | 26,46 | 46,45 | 50 | |||||||||
| Cylindre Max. Force | [KN] | 100 | ||||||||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-300 | 0-300 | 0-300 | 0-300 | 0-250 | 0-165 | |||||||||||||||
| Connexion de moteur | Linéaire (commande directe de accouplement) | ||||||||||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | ||||||||||||||||||
| Avance de vis | [millimètre] | 20 | |||||||||||||||||||||
| Puissance de moteur | [Kilowatt] | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | |||||||
| Couple évalué de moteur | [N.M] | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | |||||||
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||||
| Force évaluée de cylindre | [KN] | 2,65 | 4,65 | 7,27 | 3,97 | 6,97 | 10,91 | 7,94 | 13,94 | 21,82 | 13,23 | 23,23 | 36,36 | 26,46 | 46,45 | 50 | |||||||
| Cylindre Max. Force | [KN] | 100 | |||||||||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-300 | 0-300 | 0-300 | 0-300 | 0-300 | 0-300 | 0-250 | 0-165 | ||||||||||||||
3. Caractéristiques
| Matériel |
★ Shell : la forge de l'alliage d'aluminium, lissent, aspect élégant. (La série) Extension Rod de ★ : haut acier allié, anticorrosion. (Sries de TJER) |
| Précision |
Le ★ prennent en compte habituellement la répétabilité et la précision de moteur. Ne devrait pas prendre la tige pousseuse du cylindre électrique comme conseils pour la rectitude. Le client devrait concevoir pour posséder le mécanisme de guide. Le moteur de ★ étant parallèle relié diminuera la précision comparée à relié directement parce qu'il le besoin par la vitesse synchrone de ceinture. |
| Vitesse |
|
| Course | Le ★ la course de modèle-choisir devrait être 20-50mm plus grands que la course efficace parce que nous devons ménager de l'espace pour ralentir et s'arrêter après la tige pousseuse rencontrant le commutateur limité. Une vitesse plus rapide, le plus grand espace. |
| Poussée |
|
| Durée de cycle opérationnelle |
|
| Circulez en voiture le choix |
Moteur servo à C.A. de ★ : la haute précision, la vitesse élevée, la grande poussée et l'équilibre font un pas. Moteur de progression de ★ : haute poussée de précision, à petite vitesse et pas très grande (moins que 600kg). Le moteur normal de C.C de ★ peut être mis en application pour régler la vitesse mais ne pas être placé. Le moteur asynchrone normal de ★ ne peut pas être vitesse réglée et placé. |
Production spéciale (facultative) :
1).Special installation, conservation, prévention de la poussière, résistante à l'humidité
environnement de la température 2).High&low
3).Waterproof en mer, travail antiexplosion
4). Capteur linéaire de déplacement
capteur 5).Pressure
6). Mécanisme d'oscillation de résistance
boîte de vitesse 7).Planetary
8).Motor : Moteur servo à C.A., moteur sans brosse de C.C, moteur de progression, moteur de C.C, moteur de conversion de fréquence à C.A., etc.
4. Applications
Équipement militaire de ★ : radar, monteur de missile, plate-forme d'oscillation de véhicule blindé, équipement spécial et toute autre navires de guerre et trappe d'avions, ouverture, ajustement de hauteur de siège, système de piste d'arme, déclencheur, appui de levage expérimental, ajustement d'action de direction de ciel et terre d'artillerie de réservoir, la poussée de l'ergol combustible, l'ouverture de la porte de four, etc.
Équipement spécial de ★ : la chaîne de production d'automation industrielle, la chaîne de montage, la transmission de logistique, la plate-forme de levage, le contrôle de compensation, le contrôle de valve, le manipulateur du même rang, le couteau de CT Kama de matériel mécanique, la nourriture et l'industrie de médecine, machines-outilles à commande numérique, machine de conditionnement d'industrie, presse électronique des véhicules à moteur, indexation d'éolienne d'équipement de textile, meurent contrôle de position, maintenant, forage, plaçant.
Équipement expérimental de ★ : Plate-forme de simulation, banc d'essai, machine de vague, équipement d'essai etc.
Ce type est particulièrement approprié à :
le pressing, la chaîne de production d'ensemble de moteur et vous servo peuvent également acheter notre logiciel servo de pressing ensemble.
images ...................................
5. FAQ
| Questions | Réponses |
| Combien coûte votre quantité d'ordre minimum ? | 1 morceau. Nous avons la confiance que vous êtes satisfait de notre production. |
| Quel est le prix du produit ? | Le prix est basé sur la taille, les spécifications et les accessoires. Vous pouvez nous fournir les informations détaillées et le détail nous exige alors fera la sélection modèle pour vous et te donnera l'offre formelle. |
|
Vers quels conturies et régions vos produits exportent-ils ?
|
L'Allemagne, l'Espagne, l'Italie, le Brésil, le Mexique, le Japon, l'Iran, l'Inde et etc. Principalement utilisé pour la machine à tricoter de chaîne et la machine preesing. Par la manière, beaucoup de clients remplacent les cylindres hydrauliques et les cyinders d'air par nos cylindres électriques servo. |
|
Pourriez-vous nous offrir des aperçus gratuits ? |
Désolé nous ne pouvons pas. Mais ne vous inquiétez pas, nous peut signer le contrat d'essai avec vous. Si vous êtes satisfait de la production vous pouvez demander un remboursement. |
| J'ai acheté votre cylindre il y a 5 ans, est-ce que mais maintenant l'exactitude n'est-elle pas aussi bonne, comment je peut traiter elle ? |
Tout d'abord, merci infiniment de votre confiance et à l'aide de notre cylindre, je pense que la raison principale est la vis à l'intérieur, après environ 8000 heures de travail, vous devrait la remplacer par une nouvelle vis pour assurer l'exactitude. ★ Fm : Charge moyenne de cylindre électrique, unité : Kn ★ Ca : Charge dynamique de base d'écrou de vis, unité : Kn (peut être détecté par des échantillons de vis) ★ L : Avance de vis, unité : millimètre |
produits recommandés
-
VIDEO

-