

Tous les produits
déclencheur linéaire de force élevée d'entraînement de vis de la boule 220V/déclencheur linéaire électrique à grande vitesse




| Lieu d'origine | La Chine |
|---|---|
| Nom de marque | TJ |
| Certification | ISO9001:2008,CE |
| Numéro de modèle | TJE110 |
| Quantité de commande min | 1 pcs |
| Prix | negotiable |
| Détails d'emballage | emballage externe : carton ou boîte non en bois ; emballage de coussin : Mousse d'EPE |
| Délai de livraison | 3-4 semaines |
| Conditions de paiement | T/T, paiement de 30% à l'avance, 70% avant la livraison |
| Capacité d'approvisionnement | 800 PC par mois |
Détails sur le produit
| Matériel | En aluminium | Couleur | norme : le blue&silvery de marine, d'autres peut être adapté aux besoins du client |
|---|---|---|---|
| Vitesse | jusqu'à 625mm/s | Répétabilité | ±0.01mm |
| Course | 50~1000mm | Force de sortie | jusqu'à 30KN |
| type de connexion de moteur | linéaire/parallèle | anti-rotation interne | Avec/sans |
| AVANCE DE VIS | 5,6,8,10,20,32mm | type de connexion de charge | masculin, femelle, boulon en U, charnière principale de boule et adapté aux besoins du client |
| Mettre en évidence | déclencheur rotatoire électrique,système électrique du cylindre 220V hydraulique,Déclencheur servo linéaire de force élevée |
||
Description de produit
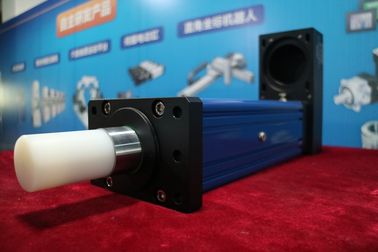
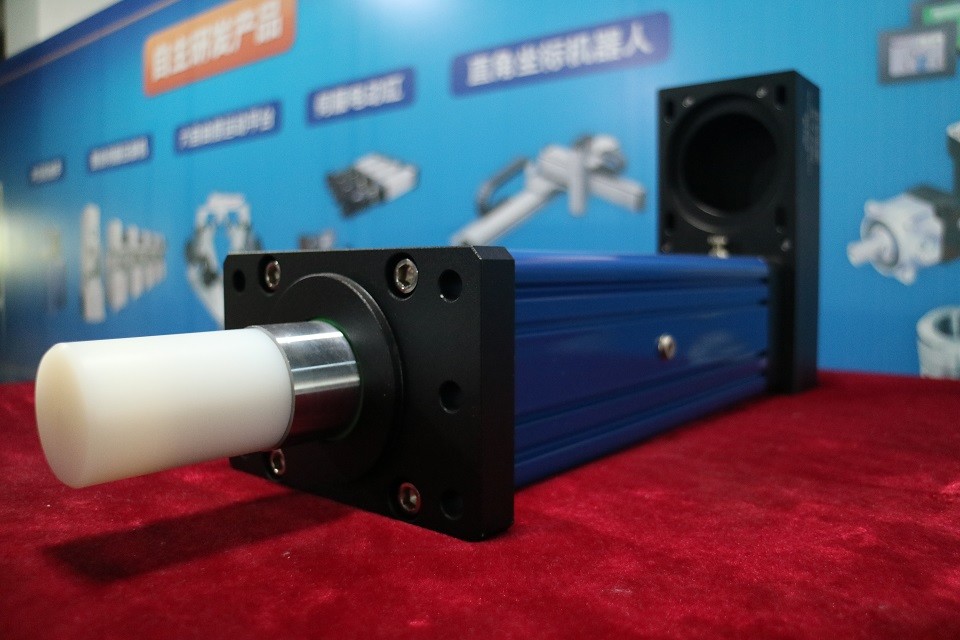
Long cylindre électrique servo de vie active avec l'anti-rotation, déclencheur linéaire de 50~1000mm
1. Au sujet du cylindre servo linéaire
Ce s'appelle également le cylindre de Servo Electric, un genre de déclencheur qui réalise le mouvement d'échange linéaire par la vis. Il transforme le mouvement de rotation du moteur servo en mouvement linéaire.
Le déclencheur linéaire servo peut transformer les avantages optimaux des moteurs servo (contrôle de vitesse de rotation précis, contrôle de nombre précis de rotation et contrôle précis de couple) en contrôle de vitesse précis, contrôle de position précis et préciser le contrôle de poussée.
Comme nouveau produit économiseur d'énergie de transmission, le cylindre électrique a assurément plus d'avantages dans consommateur d'énergie et le contrôle de la pollution.
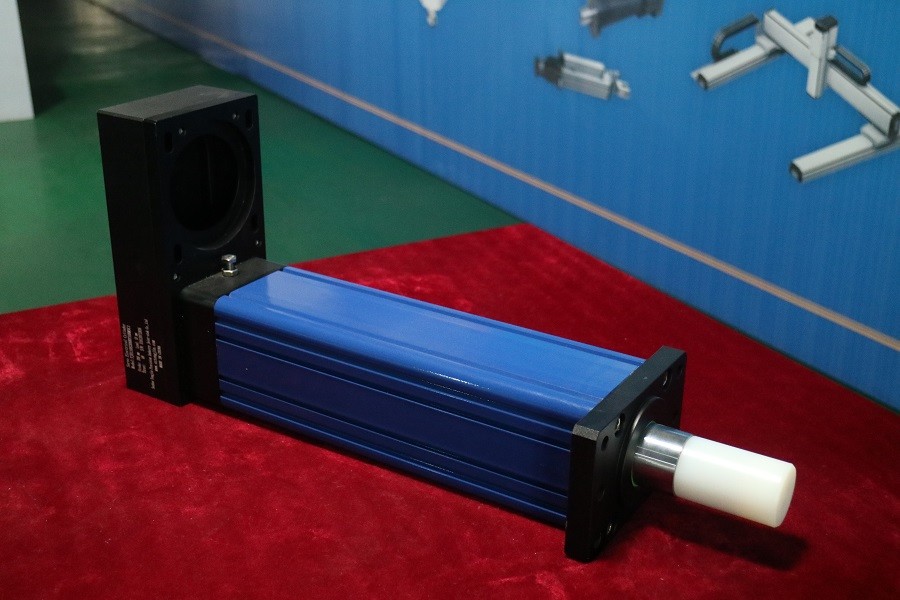
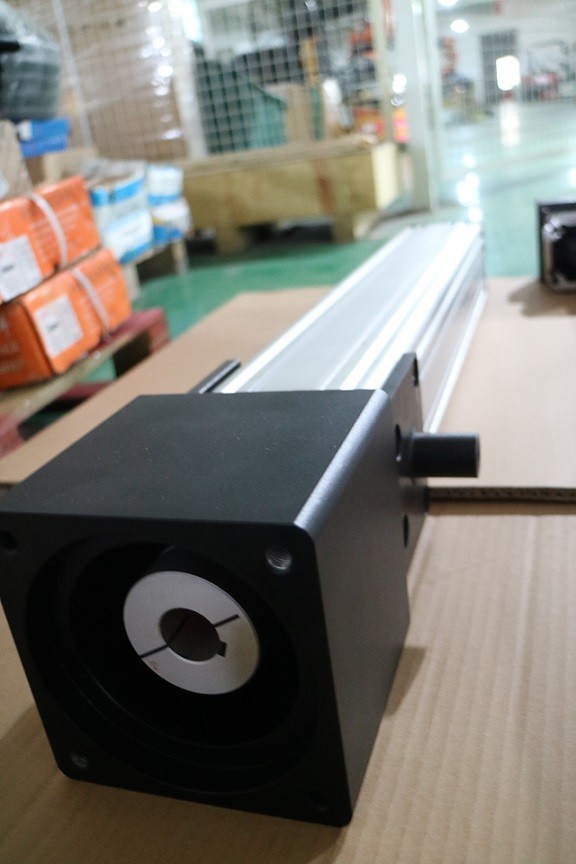
2. Types de construction
(1) linéaire : reliez le moteur et la vis de boule directement par l'accouplement, à une meilleure précision
(2) parallèle : Utilisant la commande synchrone de ceinture et de vitesse pour relier le moteur et la vis, il est plus commode et flexible pour monter
3. Couple servo électrique d'entraînement de cylindre et
table de sélection de puissance
| Connexion de moteur | Parallèle (commande par courroie) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 5 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 |
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 |
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Force évaluée de cylindre | [KN] | 5,28 | 7,75 | 10,58 | 7,92 | 11,63 | 15,88 | 15,85 | 23,26 | 31,75 | 26,41 | 30 | 30 | 30 | 30 | 30 |
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-250 | 0-165 |
0-80
|
0-50 | 0-25 | ||||||||||
| Connexion de moteur | Linéaire (commande directe de accouplement) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 5 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | |||
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | |||
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||
| Force évaluée de cylindre | [KN] | 5,28 | 7,75 | 10,58 | 15,85 | 23,26 | 31,75 | 26,41 | 30 | 30 | 30 | 30 | 30 | |||
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-250 |
0-80
|
0-50 | 0-25 | |||||||||||
| Connexion de moteur | Parallèle (commande par courroie) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 6 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 |
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 |
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Force évaluée de cylindre | [KN] | 4,4 | 6,46 | 8,82 | 6,6 | 9,69 | 13,23 | 13,2 | 19,37 | 26,46 | 22 | 30 | 30 | 30 | 30 | 30 |
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-300 | 0-200 |
0-100
|
0-60 | 0-30 | ||||||||||
| Connexion de moteur | Linéaire (commande directe de accouplement) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 6 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | |||
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | |||
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||
| Force évaluée de cylindre | [KN] | 4,4 | 6,46 | 8,82 | 13,2 | 19,37 | 26,46 | 22 | 30 | 30 | 30 | 30 | 30 | |||
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-300 |
0-100
|
0-60 | 0-30 | |||||||||||
| Connexion de moteur | Parallèle (commande par courroie) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 8 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 |
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 |
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Force évaluée de cylindre | [KN] | 3,30 | 4,85 | 6,62 | 4,96 | 7,28 | 9,92 | 9,91 | 14,55 | 19,85 | 16,52 | 24,26 | 30 | 30 | 30 | 30 |
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-400 | 0-265 |
0-130
|
0-80 | 0-40 | ||||||||||
| Connexion de moteur | Linéaire (commande directe de accouplement) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 8 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | |||
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | |||
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||
| Force évaluée de cylindre | [KN] | 3,30 | 4,85 | 6,62 | 9,91 | 14,55 | 19,85 | 16,52 | 24,26 | 30 | 30 | 30 | 30 | |||
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-400 |
0-130
|
0-80 | 0-40 | |||||||||||
| Connexion de moteur | Parallèle (commande par courroie) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 10 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 |
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 |
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Force évaluée de cylindre | [KN] | 2,65 | 3,88 | 5,29 | 3,97 | 5,82 | 7,94 | 7,94 | 11,64 | 15,88 | 13,23 | 19,41 | 26,46 | 26,46 | 30 | 30 |
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-500 | 0-330 |
0-165
|
0-100 | 0-50 | ||||||||||
| Connexion de moteur | Linéaire (commande directe de accouplement) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 10 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | |||
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | |||
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||
| Force évaluée de cylindre | [KN] | 2,65 | 3,88 | 5,29 | 7,94 | 11,64 | 15,88 | 13,23 | 19,41 | 26,46 | 26,46 | 30 | 30 | |||
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-500 |
0-165
|
0-100 | 0-50 | |||||||||||
| Connexion de moteur | Parallèle (commande par courroie) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 20 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 |
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 |
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Force évaluée de cylindre | [KN] | 1,32 | 1,94 | 2,65 | 1,98 | 2,91 | 3,97 | 3,97 | 5,82 | 7,94 | 6,62 | 9,7 | 13,23 | 13,23 | 19,4 | 26,46 |
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-625 | 0-625 |
0-330
|
0-200 | 0-100 | ||||||||||
| Connexion de moteur | Linéaire (commande directe de accouplement) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 20 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | |||
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | |||
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||
| Force évaluée de cylindre | [KN] | 1,32 | 1,94 | 2,65 | 3,97 | 5,82 | 7,94 | 6,62 | 9,7 | 13,23 | 13,23 | 19,4 | 26,46 | |||
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-625 |
0-330
|
0-200 | 0-100 | |||||||||||
| Connexion de moteur | Parallèle (commande par courroie) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 32 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 |
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 |
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Force évaluée de cylindre | [KN] | 0,82 | 1,22 | 1,66 | 1,23 | 1,82 | 2,48 | 2,47 | 3,65 | 4,97 | 4,12 | 6,08 | 8,28 | 8,23 | 12,15 | 16,56 |
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-625 | 0-625 |
0-530
|
0-320 | 0-165 | ||||||||||
| Connexion de moteur | Linéaire (commande directe de accouplement) | |||||||||||||||
| Rapport de réduction | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Avance de vis | [millimètre] | 32 | ||||||||||||||
| Puissance de moteur | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | |||
| Couple évalué de moteur | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | |||
| Vitesse nominale de moteur | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||
| Force évaluée de cylindre | [KN] | 0,82 | 1,22 | 1,66 | 2,47 | 3,65 | 4,97 | 4,12 | 6,08 | 8,28 | 8,23 | 12,15 | 16,56 | |||
| Cylindre Max. Force | [KN] | 30 | ||||||||||||||
| Vitesse de cylindre | [mm/s] | 0-625 |
0-530
|
0-320 | 0-165 | |||||||||||
4. Applications
(1) équipement militaire : radar, monteur de missile, plate-forme d'oscillation de véhicule blindé, équipement spécial et toute autre navires de guerre et trappe d'avions, ouverture, ajustement de hauteur de siège, système de piste d'arme, déclencheur, appui de levage expérimental, ajustement d'action de direction de ciel et terre d'artillerie de réservoir, la poussée de l'ergol combustible, l'ouverture de la porte de four, etc.
(2) équipement spécial : la chaîne de production d'automation industrielle, la chaîne de montage, la transmission de logistique, la plate-forme de levage, le contrôle de compensation, le contrôle de valve, le manipulateur du même rang, le couteau de CT Kama de matériel mécanique, la nourriture et l'industrie de médecine, machines-outilles à commande numérique, machine de conditionnement d'industrie, presse électronique des véhicules à moteur, indexation d'éolienne d'équipement de textile, meurent contrôle de position, maintenant, forage, plaçant.
(3) équipement expérimental : Plate-forme de simulation, banc d'essai, machine de vague, équipement d'essai etc.
Ce type est particulièrement approprié à :
(1) déforment la machine à tricoter, la vitesse rapide et la réponse rapide
(2) le pressing, la chaîne de production d'ensemble de moteur et vous servo peuvent également acheter notre logiciel servo de pressing ensemble.
![]()
![]()
5. Pourquoi choisissez-nous ?
| 1. Structure compacte et petite dimension. |
| 2. Rigidité élevée, basse inertie et réponse rapide. |
| 3. Fiabilité élevée et longue durée de fonctionnement. |
| 4. Bruit &less économiseur d'énergie. |
| 5. Ensemble et utilisation commodes, entretien simple. |
| 6. Un ans de garantie de la qualité, toute la vie service de maintenance. |
produits recommandés